

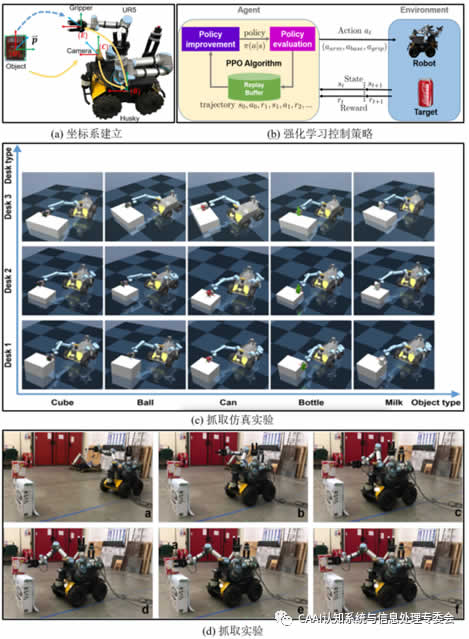
ųą┐Ųį║╔“Ļ¢ūįäė╗»╦∙Ą─Wang└¹ė├╔ŅČ╚ÅŖ╗»īW┴Ģ╦ŃĘ©║═ęĢėXĖąų¬ŽÓĮY║ŽĄ─ĘĮĘ©üĒ═Ļ│╔ęŲäėÖCŲ„╚╦(╚ńłD3(a))į┌ĘŪĮYśŗŁhŠ│Ž┬Ą─ęŲäė▓┘ū„[7]ĪŻū„š▀īóęŲäė▓┘ū„▀^│╠┐┤ū÷ę╗éĆś╦£╩Ą─ÅŖ╗»īW┴Ģå¢Ņ}Ż¼╩ūŽ╚═©▀^ļp─┐ŽÓÖC═©▀^DOPE½@╚Ī─┐ś╦╬’¾wĄ─6Dū╦æBpęį╝░ÖCŲ„╚╦▒Š¾wĄ─«öŪ░ĀŅæBst,Įėų°═©▀^╗∙ė┌PPOĄ─ÅŖ╗»īW┴Ģ╦ŃĘ©ŅA£yÖCŲ„╚╦Ą─▒Š¾wŻ¼ÖCąĄ▒█ęį╝░ÖCąĄ╩ųĄ─▀\äė▓ó┐žųŲÖCŲ„╚╦▒Š¾w▀\äėŻ¼ūŅ║¾ÖCŲ„╚╦Ą─▀\äėĀŅæBst+1║═Ēææ¬rtŻ¼ŲõųąĒææ¬ų„ę¬░³║¼┴╦š¹éĆŽĄĮyĄ─┐žųŲĒææ¬rctrlĪóÖCąĄ╩ų─®Č╦Ą─╬╗ų├Ēææ¬rdistęį╝░ūź╚ĪĀŅæBrgrasp(╚ńłD3(b))ĪŻūŅ║¾ū„š▀į┌Ę┬šµŁhŠ│║═šµīŹŁhŠ│Ž┬£yįć┴╦▓╗═¼Ė▀Č╚Ž┬Ą─ūź╚Ī│╔╣”┬╩Ż¼į┌Ę┬šµųąŻ¼┴óĘĮ¾wĄ─ūź╚Īą¦╣¹ūŅ║├▀_ĄĮ┴╦90%Ą─│╔╣”┬╩Ż¼Č°Ū“ŅÉ╬’¾w▌^▓ŅāHėą60%ū¾ėęŻ¼Č°į┌īŹļH£yįć▀^│╠ųąŻ¼į┌ū╦æB╣└ėŗš²┤_Ą─Ū░╠ߎ┬┐╔īŹ¼F─┐ś╦╬’¾wĄ─│╔╣”ūź╚Ī(╚ńłD3(c)(d))ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



