

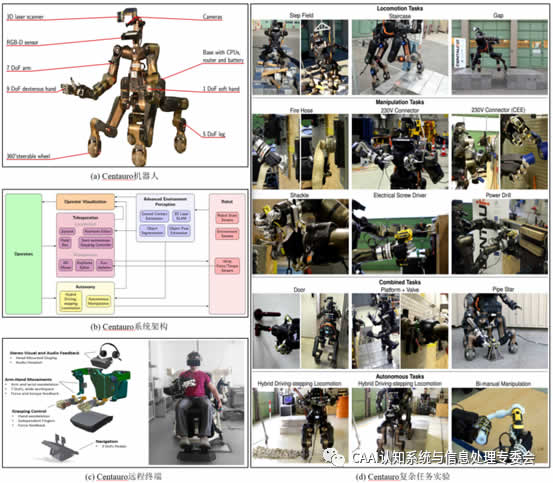
Centauro[11]╩ŪĄ┬ć°▓«Č„┤¾īWėŗ╦ŃÖCīWį║čąųŲĄ─▀b▓┘ū„▌å═╚Å═(f©┤)║ŽĄ─ęŲäė▓┘ū„ÖCŲ„╚╦(╚ńłD5(a)(b))ĪŻCentauroš¹¾w▓╔ė├┼c░ļ╚╦±RŽÓ╦ŲĄ─śŗ(g©░u)ą═Ż¼Ņ^▓┐┼õéõę╗éĆ3ŠS╝ż╣Ō└ū▀_Ż¼īŹ¼F(xi©żn)ī”Łh(hu©ón)Š│Ą─╚²ŠSĮ©zhonłD║═Ėąų¬Ż╗Ņ^▓┐Ž┬Č╦╦─ų▄┼õų├3éĆÅVĮŪŽÓÖCė├ė┌īŹĢr▒O(ji©Īn)┐žĖ„▓┐ĘųĄ─▀\äėĀŅæB(t©żi)Ż╗Ņi▓┐┼õéõę╗┼_kinectŽÓÖCė├ė┌ī”ūź╚Ī─┐ś╦╬’¾wĄ─ūRäe║═ū╦æB(t©żi)╣└ėŗŻ╗╝ń▓┐┼õéõā╔éĆŲ▀ūįė╔Č╚Ą─ÖCąĄ▒█║═9ūįė╔Č╚Ą─ÖCąĄ╩ųŻ¼┐╔ęį═Ļ╚½─ŻĘ┬╚╦¾w╩ų▒█Ą─╚½▓┐▀\äėŻ¼ÖCąĄ╩ų═¾▓┐┼õéõ┼ż┴”é„ĖąŲ„║═╩ų▓┐┼õéõē║┴”é„ĖąŲ„Ż¼ė├ė┌▓┘ū„Č╦Ą─┴”Ę┤üŻ╗ąąū▀ÖCśŗ(g©░u)ė╔╦─éĆ5ūįė╔Ą─ÖCąĄ═╚śŗ(g©░u)│╔Ż¼┐╔═Ļ│╔╚╦¾w═╚▓┐▀\äėĄ──ŻĘ┬Ż¼├┐éĆ═╚▓┐Š▀ėą¬Ü┴ó“ī(q©▒)äėĄ─ų„äė▌åŻ¼┐╔īŹ¼F(xi©żn)ŲĮš¹┬Ę├µ┐ņ╦┘ęŲäė║═Å═(f©┤)ļs┬Ę├µĄ─▓ĮæB(t©żi)▀\äėŻ¼═╚▓┐▀\äėė╔╗∙ū∙Ą─ā╔éĆRGBŽÓÖCīŹĢr▒O(ji©Īn)┐žŻ╗┐žųŲå╬į¬ė╔╚²éĆPCśŗ(g©░u)│╔Ż¼Ęųäežōž¤╗∙ĄA(ch©│)ŽĄĮy(t©»ng)┐žųŲŻ¼ęĢėXĖąų¬╠Ä└Ē║═Ė▀╝ē╣”─▄┐žųŲ(ČÓé„ĖąŲ„öĄ(sh©┤)ō■(j©┤)╚┌║Ž)ĪŻ▓┘ū„š▀┐╔═©▀^▀h│╠▓┘ū„ŲĮ┼_(╚ńłD5(c))īŹĢr▓┘ū„Cantauro═Ļ│╔Ė„ĘNÅ═(f©┤)ļs▓┘ū„╚╬äš(w©┤)Ż¼═©▀^║åå╬įO(sh©©)ų├Ż¼Centauro═©▀^╚┌║Žūį╔ĒöyĦĄ─ČÓé„ĖąŲ„ą┼Žó┐╔īŹ¼F(xi©żn)ūįų„ęŲäė║═ūź╚Ī▓┘ū„ĪŻTobias Klamt[12]£yįć┴╦Centauroį┌ČÓĘN▓┘ū„╚╬äš(w©┤)ųąĄ─ŽĄĮy(t©»ng)ĘĆ(w©¦n)Č©ąį(╚ńłD5(d))ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦(d©Żo)ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦(d©Żo)į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦(d©Żo)ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖCŲ„╚╦ |



