
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
į┌Ė▀Š½Č╚Ą─ūź╚Ī║═čb┼õ╣żū„ųąŻ¼āHāHę└┐┐ÖCąĄ╩ų▒Š╔ĒĄ─Š½Č╚▓╗─▄ØMūŃ╚╬äšę¬Ū¾ĪŻĮ³Ų┌į┌IEEE TRANSACTIONS ON MECHATRONICS ╔Ž░l▒ĒĄ─ę╗Ų¬├¹×ķĪČA Survey of Methods and Strategies for High-Precision RoboticGrasping and Assembly TasksĪ¬Some New TrendsĪĘĄ─╬─š┬ī”Į³─ĻüĒį┌ÖCŲ„╚╦Ė▀Š½Č╚ūź╚Ī║═čb┼õĘĮ├µĄ─蹊┐╣żū„▀Mąą┴╦ĘųŅÉĪó╗žŅÖ║═▒╚▌^Ż¼▓óĻU╩÷┴╦įōŅIė“Ą─蹊┐┌ģä▌ĪŻ
╬─š┬ĮķĮB┴╦Ė▀Š½Č╚ÖCŲ„╚╦▓┘┐žĄ─╬ÕŅÉĘĮĘ©:Ż©1Ż®╗∙ė┌é„Ėąą┼ŽóĄ─ĘĮĘ©Ż©2Ż®╗∙ė┌╚ßĒśÖCśŗĄ─ĘĮĘ©Ż©3Ż®╗∙ė┌ŁhŠ│╝s╩°Ą─ĘĮĘ©Ż©4Ż®╗∙ė┌Ėąų¬╝s╩°╝»│╔Ą─ĘĮĘ©Ż©5Ż®Ę┬╔·Ą─ĘĮĘ©ĪŻ╚ńłD1╦∙╩ŠŻ¼╩ŠęŌłDš╣╩Š┴╦╬ÕŅÉĘĮĘ©ų«ķgĄ─▓Ņ«ÉĪŻį┌ÖCŲ„╚╦▓┘┐žųąŻ¼ų„¾w╩ŪÖCŲ„╚╦Ą─╩ų▒█║═╩ųŻ¼┐═¾w╩ŪŁhŠ│║═▒╗▓┘┐žĄ─ī”Ž¾ĪŻ╠ōŠĆ▒Ē╩Šé„Ėąą┼ŽóŻ¼╗ž┬Ę▒Ē╩Šé„ĖąŲ„Ėąų¬ĄĮĄ─ūŅą┬ĀŅæBĪŻ

łD1 Ė▀Š½Č╚ÖCŲ„╚╦▓┘┐žĘĮĘ©ŅÉą═Ż©1Ż®╗∙ė┌é„Ėąą┼ŽóĄ─ĘĮĘ©Ż©2Ż®╗∙ė┌╚ßąįÖCśŗĄ─ĘĮĘ©Ż©3Ż®╗∙ė┌ŁhŠ│╝s╩°Ą─ĘĮĘ©Ż©4Ż®╗∙ė┌Ėąų¬╝s╩°╝»│╔Ą─ĘĮĘ©Ż©5Ż®Ę┬╔·Ą─ĘĮĘ©
1Īó╗∙ė┌Ėąų¬ą┼ŽóĄ─Ė▀Š½Č╚ÖCŲ„╚╦▓┘┐žĘĮĘ©
Ąõą═Ą─ė├ė┌ÖCŲ„╚╦▓┘┐ž╚╬䚥─é„ĖąŲ„ų„ę¬░³└©ęĢėXé„ĖąŲ„ĪóŠÓļxé„ĖąŲ„║═┴”/┼żŠžé„ĖąŲ„Ż¼╚ńłD2╦∙╩ŠĪŻ

łD2 æ¬ė├į┌ÖCŲ„╚╦▓┘┐ž╚╬äšųąĄ─Ąõą═é„ĖąŲ„Ż©1Ż®Ė▀╦┘╣żśIŽÓÖCŻ©2Ż®ųŪ─▄╣żśIözŽ±Ņ^Ż©3Ż®╝ż╣ŌŠÓļxé„ĖąŲ„Ż©4Ż®┴ó¾wŽÓÖCŻ©5Ż®ĮYśŗ╣Ōé„ĖąŲ„Ż©6Ż®’wąąĢrķgŽÓÖCŻ©7Ż®ĻP╣Ø┼żŠžé„ĖąŲ„Ż©8Ż®═¾┴”/┼żŠžé„ĖąŲ„Ż©9Ż®╩ųųĖē║┴”é„ĖąŲ„Ż©10Ż®╩ųųĖė|ėXĻć┴ą
1Ż®ęĢėXé„ĖąŲ„
╩ūŽ╚Ż¼ęĢėXé„ĖąŲ„┐╔ė├ė┌─┐ś╦ūRäe║═ū╦æB╣└ėŗŻ¼įSČÓėŗ╦ŃÖCęĢėX╦ŃĘ©▒╗ė├ė┌ÖCŲ„╚╦▓┘┐ž[1]-[7]ĪŻŲõ┤╬Ż¼ęĢėXé„ĖąŲ„┐╔ęįė├ė┌£y┴┐║═Č©╬╗ĪŻĖ∙ō■ļp─┐╗“ČÓ─┐ęĢėXŽĄĮyĄ─ęĢ▓ŅįŁ└ĒŻ¼┐╔ęįėŗ╦Ń│÷─┐ś╦╬’¾wĄ─╬╗ų├║═ĘĮŽ“ĪŻį┌[8]ųąķ_░l┴╦ę╗ĘN╗∙ė┌ČÓ╣”─▄┴ó¾węĢėXŽĄĮyĄ─┴ó¾węĢėXĘųĖŅĘĮĘ©Ż¼╦³┐╔ęį£y┴┐║═Ė·█ÖŠ▀ėąŪ·├µĄ─╬’¾wĄ─╬╗ų├║═ĘĮŽ“[9]ĪŻį┌[10]ųą╠ß│÷┴╦ę╗ĘNė├ė┌ęčų¬─┐ś╦╚²ŠSū╦æB╣└ėŗĄ─ęĢėXę²ī¦ÖCŲ„╚╦ŽĄĮyŻ¼┐╔ęįėąą¦Ąžūź╚Ī3-D─┐ś╦ĪŻ[11]ųąįOėŗ┴╦ę╗éĆĖ▀Š½Č╚ęĢėX╦┼Ę■╬óčb┼õŽĄĮyŻ¼įōŽĄĮy─▄ē“ū÷ĄĮ╬ó▌S┐ūī”£╩┼c▌S┐ūčb┼õ═¼Ģr▀MąąĪŻčąŠ┐╚╦åT└¹ė├ęĢėXą┼ŽóŻ¼╠ß│÷┴╦ę╗ĘN╗∙ė┌ų¦│ųŽ“┴┐ÖC(SVM)┼cų„į¬Ęų╬÷(PCA)╚┌║ŽĄ─ģ^ķg╣└ėŗā×╗»╦ŃĘ©Ż¼Ė∙ō■īŹ“×öĄō■[12]ė¢ŠÜÖCŲ„╚╦ĮKČ╦▀\äėģóöĄŻ¼ęÄäØ▀\äė▄ē█EĪŻ
2Ż®ŠÓļxé„ĖąŲ„
ŠÓļxé„ĖąŲ„┐╔ęįĖąų¬─┐ś╦³c║═é„ĖąŲ„ų«ķgĄ─ŠÓļxŻ¼▓╔ė├╚ń┴ó¾w╚²ĮŪ£y┴┐Īó╣ŌŲ¼╚²ĮŪ£y┴┐ĪóĮYśŗ╣ŌĪó’wąąĢrķgĪóĖ╔╔µ£y┴┐ĪóŠÄ┤a┐ūÅĮ£y┴┐Ą╚ĘĮĘ©½@╚ĪöĄō■ĪŻ
ęįŽ┬╩ŪÖCŲ„╚╦▓┘┐ž╚╬äšųą│Żė├Ą─ÄūĘNŠÓļxé„ĖąŲ„Ż║Ż©1Ż®╝ż╣Ō£yŠÓé„ĖąŲ„┐╔ęį┐ņ╦┘£╩┤_Ąž½@╚Īé„ĖąŲ„┼c─┐ś╦[13]ų«ķgĄ─ŠÓļxŻ¼ų„ę¬╚▒³c╩Ū│╔▒ŠĖ▀ĪŻŻ©2Ż®┴ó¾wŽÓÖCŻ║╩╣ė├ā╔┼_ŽÓÖC┼─özłDŽ±Ż¼╩╣ė├Ųź┼õ╦ŃĘ©╗“╚²ĮŪ£y┴┐[14]-[17]ėŗ╦ŃŠÓļxĪŻ╦³Ą─ė▓╝■Å═ļsČ╚▀mųąŻ¼Ą½ėŗ╦ŃÅ═ļsČ╚▌^Ė▀Ūęį┌╚§╣Ō╗“łDŽ±╠žš„▓╗ŪÕ╬·Ą─ŪķørŽ┬▓╗─▄š²│Ż╣żū„ĪŻŻ©3Ż®ĮYśŗ╣Ōé„ĖąŲ„Ż¼═©▀^ėŗ╦Ń╣ŌĄ─ūāą╬Ż¼Ž“╬’¾w░l╔õ┐╔┐žĮYśŗ╣ŌŻ¼½@╚Ī─┐ś╦ģóöĄĪŻĮYśŗ╣ŌĄ─ā׳c╩Ū¬Ü┴óė┌ł÷Š░Ż¼ĮĄĄ═┴╦Ųź┼õĄ─ļyČ╚ĪŻ╚▒³c╩ŪČÓéĆé„ĖąŲ„Ą─ŽÓ╗źĖ╔ö_Ż¼▓╗─▄į┌ÅŖ╣ŌŽ┬╣żū„ĪŻŻ©4Ż®’wąąĢrķgŽÓÖCŻ¼═©▀^▀B└m░l╦═╣Ō├}ø_Ż¼Įė╩š╬’¾wĘĄ╗žĄ─╣ŌŻ¼ėøõø╣ŌĄ─’wąąĢrķgŻ¼Ą├ĄĮŠÓļxĪŻ┼c╝ż╣Ō£yŠÓé„ĖąŲ„ŽÓ╦ŲŻ¼▀@ĘNé„ĖąŲ„Š▀ėą┴╝║├Ą─Š½Č╚║═¶ö░¶ąįĄ½▓┐╩│╔▒ŠĖ▀ĪŻ
ŠÓļxé„ĖąŲ„(łD2Ż¼łDŲ¼3-6╦∙╩Š)┐╔ęį▀Mąą─┐ś╦£y┴┐║═ū╦æB╣└ėŗĪŻį┌[18]ųą└¹ė├┴ó¾w╚²ĮŪ£y┴┐Ę©īŹ¼F┴╦╗∙ė┌╩ųč█┴ó¾wŽÓÖCĄ──┐ś╦╚²ŠSĮ©─ŻŻ¼▓ó╠ß│÷┴╦ę╗ĘNĘų╬÷ĘĮĘ©üĒ┼ąöÓĮoČ©ī”Ž¾į┌šµīŹŁhŠ│Ž┬Ą─Šų▓┐║═╚½Šų┐╔▀_ąįĪŻ
3Ż®┴”é„ĖąŲ„
į┌ÖCŲ„╚╦▓┘┐žųąŻ¼┴”/┼żŠžą┼Žó▒╗ÅVĘ║ė├ė┌Ž¹│²┴Ń▓┐╝■Ą─╬óąĪ╬╗ū╦š`▓ŅĪŻÖCŲ„╚╦▓┘┐žųą│Żė├Ą─┴”é„ĖąŲ„Ż©łD2Ż¼łDŲ¼7-10╦∙╩ŠŻ®Ż¼░³└©┴∙▌S┴”/┼żŠžé„ĖąŲ„║═ė|ėXé„ĖąŲ„ĪŻŪ░š▀═©│Ż░▓čbį┌ÖCŲ„╚╦Ą─ĻP╣Ø║═╩ų═¾╔ŽŻ¼═©▀^äéąį▀BĮėĖąų¬╬’¾w╔ŽĄ─┴”╗“┼żŠžŻ╗║¾š▀ų„ę¬░▓čbį┌ÖCąĄ╩ųųĖ╝Ō╗“╩ųšŲ╔ŽŻ¼ė├üĒĖąų¬ī”æ¬ÖCąĄ▓┐ĘųĄ─š²ē║┴”ĪŻ
Ż©1Ż®ĻP╣Ø┼żŠžé„ĖąŲ„Ż║īóé„ĖąŲ„░▓čbį┌ÖCŲ„╚╦Ą─ĻP╣Ø╔ŽŻ¼½@╚ĪÖCŲ„╚╦▀\äėĢrĄ─┼żŠžą┼ŽóĪŻę╗ĘĮ├µŻ¼└¹ė├ĻP╣Ø┼żŠžüĒūRäeÖCŲ„╚╦┼c╬’¾wų«ķgĄ─Įėė|ĻPŽĄĪŻ┴Ēę╗ĘĮ├µŻ¼ĻP╣Ø┼żŠžą┼Žó│Żė├ė┌ÖCąĄ╩ųĄ─╚ßąį┐žųŲĪŻį┌[19]ųą╠ß│÷┴╦ę╗ĘN└¹ė├─Ż║²═Ų└ĒÖC(FIM)▀Mąąčb┼õĄ─ĘĮĘ©Ż¼įōĘĮĘ©┐╔ęįĖ∙ō■čb┼õ▀^│╠ųąĄ─Įėė|ą┼Žó┐ņ╦┘═ŲöÓ│÷«öŪ░Ą─Įėė|ĀŅæBĪŻčąŠ┐╚╦åTįOėŗ┴╦ę╗ĘN╗∙ė┌ĻP╣Ø┼żŠžą┼ŽóĄ─╚ßąį┐žųŲŲ„Ż¼į┌ĻP╣ØÖCąĄūĶ┐╣╬┤ų¬Ą─ŪķørŽ┬š{╣Ø─®Č╦ł╠ąąŲ„Ą─╚ßąįĪŻ[20]īóų„äė╚ßČ╚┐žųŲ╦ŃĘ©┼c▒╗äė╚ßČ╚ÖCųŲŽÓ╚┌║ŽŻ¼į┌╗∙ė┌╝Īļņ“īäėĄ─ÖCąĄ╩ųŲĮ┼_╔ŽīŹ¼F┴╦░▓╚½Ą─╚╦ÖCĮ╗╗źĪŻčąŠ┐╚╦åT└¹ė├ĻP╣Ø┴”Šžą┼ŽóįOėŗ┴╦ŲĮ║ŌŪ░ü┐žųŲŲ„Ż¼═©▀^Ą³┤·īW┴Ģ┐žųŲ[21]īŹ¼FŅÉ╚╦▀\äėĪŻ
Ż©2Ż®═¾┴”/┼żŠžé„ĖąŲ„:┼cĻP╣Ø┼żŠžé„ĖąŲ„ŅÉ╦ŲŻ¼═¾▓┐é„ĖąŲ„╝╚┐╔ė├ė┌┤_Č©ÖCŲ„╚╦┼c╬’¾wų«ķgĄ─Įėė|ĀŅæB[22]Ż¼ę▓┐╔ė├ė┌┤_Č©ÖCŲ„╚╦▓┘┐žŽĄĮyĄ─æTąįģóöĄ[23]ĪŻį┌[24]ųą╠ß│÷┴╦ę╗ĘN└¹ė├┴”╗“┼żŠžą┼Žó£╩┤_ūRäeį┌╬╗ų├/ĘĮ╬╗▓╗┤_Č©Śl╝■Ž┬Ą─Įėė|ĀŅæBĄ─ĘĮĘ©ĪŻ[25]īŹ¼F┴╦ę╗ĘN╗∙ė┌┴”/┼żŠžé„Ėąą┼ŽóĄ─£╩ņoæBĘų╬÷ĘĮĘ©ĪŻ«öÖCŲ„╚╦ė÷ĄĮ▌^┤¾Ą─ĘĮŽ“š`▓ŅĢrŻ¼įōĘĮĘ©┐╔ęįėąą¦Ąžš{š¹┴”/┼żŠžĪŻė╔ė┌┴”/┼żŠžą┼Žóį┌čb┼õ▀^│╠ųą╩ŪŠų▓┐║═╦▓æBĄ─Ż¼čąŠ┐┴”Šžą┼Žó┼cŲõ╦¹╚½Šųą┼Žó╚ń║╬╚┌║Žį┌ę╗Ų╩Ūę╗éĆ║▄ėąārųĄĄ─░lš╣ĘĮŽ“ĪŻ╚ń║╬ŲĮ║Ō£╩┤_ąį║═ņ`├¶Č╚ų«ķgĄ─├¼Č▄[26]Ż¼ęį╝░╚ń║╬īŹ¼FĖ„ĘNĮėė|/ĘŪĮėė|ĀŅæBų«ķgĄ─ėąą¦ŪąōQ[27]ę▓╩Ū╚╦éāĖą┼d╚żĄ─å¢Ņ}ĪŻ
Ż©3Ż®╩ųšŲ║═ųĖ╝Ōė|ėXé„ĖąŲ„:īóė|ėXé„ĖąŲ„░▓čbį┌╩ųšŲ╗“╩ųųĖĄ──®Č╦Ż¼½@╚ĪĮėė|┴”╗“ē║┴”ĪŻ╦³éā═©│Żė├ė┌Įėė|ĀŅæBūRäe[28]Ż¼ė├ė┌─”▓┴╣└ėŗ[29]Ż¼╗“ė├ė┌ūź╚Ī▀^│╠ųąĄ─╗¼ęŲÖz£y[30]ĪŻ×ķ┴╦ĮŌøQūź╚Īå¢Ņ}Ż¼čąŠ┐╚╦åTī”ūź╚ĪĮėė|─Żą═ū÷┴╦┤¾┴┐╗∙ĄAąį╣żū„[31]-[33]ĪŻ[34]-[36]ųąī”ÖCŲ„╚╦╚ßąį╩ųųĖūź╚Ī─Żą═▀Mąą┴╦ę╗ŽĄ┴ąčąŠ┐ĪŻčąŠ┐š▀╩╣ė├░▓čbį┌ņ`Ū╔╩ų╔ŽĄ─Įėė|é„ĖąŲ„üĒĖ▀Š½Č╚ĪóĖ▀╦┘Ąž╣└ėŗŲĮ├µ╬’¾wĄ─╬╗ų├║═ĘĮŽ“ĪŻ[37]įOėŗ┴╦ę╗ĘN└¹ė├ė|ėXą┼Žóū„×ķĘ┤üüĒĘų╬÷ūź╚Ī│╔╣”┬╩Ą─╦ŃĘ©ĪŻ└¹ė├╚╦╣żųŪ─▄ĘĮĘ©Ęų╬÷ė|ėXé„ĖąŲ„½@╚ĪĄ─ą┼Žó╩Ūę╗ĘN┌ģä▌ĪŻŪÕ╚A┤¾īWīOĖ╗┤║Į╠╩┌łFĻĀ╠ß│÷Ą─╗∙ė┌śOŽ▐īW┴ĢÖC(ELM)Ą─ė|ėXĖąų¬ūRäeĘĮĘ©[38]ĪŻ┤╦═ŌŻ¼[39]╩╣ė├▒OČĮīW┴ĢĘĮĘ©Ż¼ŅA£yūź╚Ī▀^│╠ųą░l╔·Ą─╗¼ęŲŪķørĪŻ[40]└¹ė├ęĢėXą┼Žó║═ļŖūėą┼ŽóįOėŗ┴╦ę╗ĘNė|ėXé„ĖąŲ„Ą─╠µ┤·ŲĘŻ¼īó裣h╔±ĮøŠWĮj(RNN)║═ķLČ╠Ģrėøæø(LSTM)ŠWĮjŽÓĮY║ŽŻ¼üĒūRäe┐╔ūāą╬║═▓╗┐╔ūāą╬╬’¾wĄ─ūā╗»─Ż╩ĮĪŻ
2Īó╗∙ė┌╚ßąįÖCśŗĄ─Ė▀Š½Č╚ÖCŲ„╚╦▓┘┐ž
į┌ÖCąĄ╣ż│╠ųąŻ¼╚ßąįÖCśŗ╩Ū═©▀^ÅŚąį¾wĄ─ūāą╬üĒé„▀f╗“▐DōQ▀\äėĪó┴”╗“─▄┴┐Ą─╚ßąįÖCśŗĪŻ╩╣ė├╚ßĒśÖCśŗ┐╔ęįīŹ¼FÖCŲ„╚╦╩ų▒█╗“╩ųĄ─▒╗äė╚ßąį▀\äėŻ¼Å─Č°į╩įSį┌▀@ĘN▀\äė▀^│╠ųąŽ¹│²čb┼õ▓┐╝■ų«ķgĄ─╬╗ū╦š`▓ŅĪŻĄõą═Ą─čbų├░³└©▀hČ╦╚ßąįųąą─(RCC)║═┐╔ūāūĶ┐╣ł╠ąąŲ„(VIA)ĪŻ

łD3 ę╗░ŃRCCĄ─ÖCąĄĮYśŗ
Ż©1Ż®▀hČ╦╚ßąįųąą─(RCC)
RCC╩Ūė╔Whitney║═Nevins░l├„Ą─Ż¼ė├ė┌Ä═ų·ÖCŲ„╚╦═Ļ│╔▓Õ╚ļ║═čb┼õ╚╬äš[41]ĪŻį┌╦¹éāĄ─蹊┐ųąŻ¼╦¹éāÅVĘ║Ąžėæšō┴╦ÖCŲ„╚╦Ą─▓Õ╚ļ▀^│╠[42]ĪŻį┌▓Õ╚ļ▀^│╠ųąŻ¼õNßöĢ■į┌▌SŽ“ą²▐DŖA│ųŲ„Ž┬āAą▒Ż¼▀@ĘQ×ķ╚ßąįųąą─ĪŻ╚ńłD3╦∙╩ŠŻ¼RCCčbų├īŹļH╔Ž╩Ūę╗éĆėą6éĆūįė╔Č╚Ą─ÅŚąįÖCśŗŻ¼┐╔ęįĖ─ūāŽĄĮy╚ßČ╚ųąą─Ą─╬╗ų├ĪŻį┌[43]ųąķ_░l┴╦ę╗ĘNŠ▀ėąėŗ╦ŃÖC┐╔š{ūĶ┐╣Ą─ų„äė╚ßąį─®Č╦ł╠ąąŲ„ĪŻ─┐Ū░Ż¼īóRCC┼cŲõ╦¹įOéõ╗“┐žųŲĘĮĘ©ŽÓĮY║Ž╩ŪĘŪ│ŻėąčąŠ┐ārųĄĄ─šnŅ}ĪŻ

łD4 å╬ūįė╔Č╚VSA┼cŁhŠ│ŽÓ╗źū„ė├Ą─┘|┴┐─Żą═
Ż©2Ż®┐╔ūāäéČ╚ł╠ąąÖCśŗŻ©VSAŻ®
ę╗ĘNą┬ą═ł╠ąąŲ„VSA▒╗ę²╚ļīŹ¼F┼cŁhŠ│Ą─╚ßąįĮ╗╗źŻ¼╚ńłD4╦∙╩ŠĪŻ─┐Ū░Ż¼[44]╠ß│÷┴╦ę╗ĘN└¹ė├VIAs▀Mąą▌S┐ūčb┼õĄ─Ą═│╔▒ŠĮŌøQĘĮ░ĖĪŻ[45]ųą╠ß│÷┴╦ę╗ĘNą┬Ą─VSAįOėŗŻ¼įōįOėŗ┐╝æ]┴╦į┌▀\äėł╠ąą▀^│╠ųąĖ─ūāé„äėäéČ╚Ą─┐╔─▄ąįŻ¼ę“┤╦Ż¼į┌▒Ż│ųĄ═é¹║”’LļU╦«ŲĮĄ─═¼ĢrŻ¼į╩įS┤¾Ę∙Č╚Ą─▀\äė╝ė╦┘ĪŻ─┐Ū░Ż¼įSČÓ╩╣ė├VSAs┤·╠µäéČ╚ļŖÖCĄ─ÖCŲ„╚╦╩ų▒█║═╩ųĄ─įŁą═š²į┌ķ_░l[46]-[48]ĪŻ
VSAī”ė┌ÖCŲ„╚╦ūź╚Ī║═čb┼õ╠žäeėąė├Ż¼╦³īół╠ąą╚ßąį▀\äėĄ──▄┴”š¹║ŽĄĮł╠ąąŲ„ųąŻ¼▀@┤¾┤¾ĮĄĄ═┴╦įOėŗĦėą═Ō┴”╗“┼żŠžé„ĖąŲ„Ą─╚ßąį┐žųŲŲ„Ą─ļyČ╚ĪŻ─┐Ū░ĻPė┌VSAĄ─ėæšōų„ę¬╝»ųąį┌╚ń║╬▀_ĄĮĮoČ©─┐Ą─Ą─ūŅā×įOėŗĘĮ░ĖĪŻ
3Īó╗∙ė┌ŁhŠ│╝s╩°Ą─Ė▀Š½Č╚ÖCŲ„╚╦▓┘┐ž
│²┴╦╩╣ė├╚ßąįÖCśŗüĒ╠ß╣®ÖCŲ„╚╦Ė▀Š½Č╚▓┘┐ž╦∙ąĶĄ─╚ßČ╚═ŌŻ¼ÖCŲ„╚╦┼c▒╗▓┘┐žī”Ž¾ų«ķg▀Ć┤µį┌ÅVĘ║Ą─╝s╩°Śl╝■Ż¼╚ń┼õų├╝s╩°║═┴”╝s╩°ĪŻ└¹ė├▀@ą®╝s╩°Śl╝■Ż¼╠žäe╩Ūį┌ĮoČ©ŽĄĮyųąĄ─é„Ėąą┼Žó╬┤ų¬╗“▓┐Ęų╬┤ų¬Ą─ŪķørŽ┬┐╔ęį×ķÖCŲ„╚╦įOėŗę╗éĆėąą¦Ą─▓┘┐ž▓▀┬įŻ¼Ąõą═Ą─ĘĮĘ©░³└©ŁhŠ│╬³ę²ģ^(ARIE)║═╗\ą═ĪŻ
Ż©1Ż®ŁhŠ│╬³ę²ģ^
ARIE╩ŪŁhŠ│ą╬│╔Ą─╝s╩°ģ^ė“Ż¼┤µį┌ė┌ÖCŲ„╚╦ŽĄĮyĄ─śŗą═┐šķgųąĪŻARIEĄ─Ė┼─Ņį┌[49]ųą╠ß│÷ĪŻ[50]▀Mę╗▓Įėæšō┴╦į┌╔·«aųąīŹ¼F¤oé„ĖąŲ„Ė▀Š½Č╚▓┘┐žÖCŲ„╚╦Ą─Ė┼─ŅĪŻ═©▀^└¹ė├śŗą═┐šķgųąĄ─ŁhŠ│╝s╩°Ż¼¤oąĶ┴”é„ĖąŲ„╝┤┐╔į┌╬’└Ē┐šķgųą▀MąąĖ▀Š½Č╚čb┼õŻ©ģóęŖłD5Ż®ĪŻ
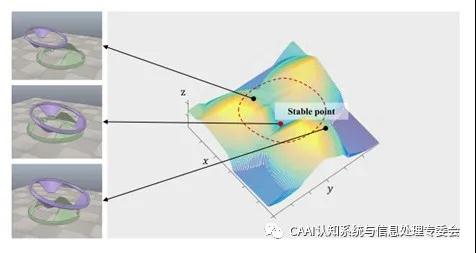
łD5 R3┐šķgųąĄ─ā╔éĆÅ═ļs▓┐Ęų╝░Ųõī”æ¬Ą─ARIE
ū¾Ż║Å═ļs┴Ń╝■Ą─Įėė|ĀŅæB ėęŻ║ARIEųąĄ─ŽÓ欳c
╗∙ė┌įō└ĒšōŻ¼─┐Ū░═Ļ│╔┴╦ČÓéĆĖ▀Š½Č╚Ą─ÖCŲ„╚╦▓┘┐ž╚╬äšĪŻ└²╚ńŻ¼į┌Ų¹▄ćųŲįņśIŻ¼└¹ė├╗∙ė┌ARIEĄ─ĘĮĘ©įOėŗ┴╦ę╗ĘNŲ½ą─Ą─¤oßö┐ūé„ĖąŲ„ĮMčbŽĄĮy[51]ĪŻčąŠ┐╚╦åT▀Ćķ_░l┴╦ę╗ĘN╗∙ė┌ęĢėXĄ─╚²ŠSūź╚ĪęÄäØĘĮĘ©Ż¼āHąĶę¬ę╗Åł[52]łDŽ±ĪŻį┌ūŅĮ³Ą─蹊┐ųąŻ¼[53]▓╗āHėæšō┴╦ARIEĄ─Č©┴x║═ÅV┴xŚl╝■Ż¼Įo│÷┴╦ARIEĄ─ę╗░ŃöĄīW├Ķ╩÷Ż¼Ęų╬÷┴╦į┌▓╗═¼śŗą═┐šķgųąARIE┤µį┌Ą─Śl╝■Ż¼Č°Ūęųž³cėæšō┴╦Ė▀ĪóĄ═ŠS┐šķgųąARIEĄ─ĻPŽĄĪŻ
Ż©2Ż®╗\ą═
╠ß│÷╗\ą═å¢Ņ}╩Ū×ķ┴╦šęĄĮę╗ĮM╩ųųĖĄ─Ę┼ų├³cŻ¼įō╩ųųĖĄ─Ę┼ų├┐╔ęįĘ└ų╣ČÓ▀ģą╬╚╬ęŌęŲäė▀hļxŲõĮoČ©╬╗ų├[54]ĪŻ╗\ą╬└Ēšō┐╔ęįæ¬ė├ė┌ÖCŲ„╚╦ūź╚ĪŅIė“ĪŻ[55]蹊┐┴╦╗\ą═śŗą═┼cūź╚Īśŗą═ų«ķgĄ─ĻPŽĄĪŻ[56]īóūź╬šĄ─╣żū„öUš╣ĄĮ┴╦╗\ą╬Ż¼╩╣ė├╠žš„ą╬ĀŅüĒĮĄĄ═ņ`Ū╔╩ųĄ─ŠSČ╚Ż¼▀Ć└¹ė├┐šķgė│╔õėąą¦Ąž£y┴┐┴╦╗\ą═Ą─¶ö░¶ąįĪŻ[57]-[59]╠ß│÷┴╦ę╗ĘN╗∙ė┌ęĢėXĄ─╣żśIŖA│ųŲ„Ą─╗\ą═ūź╚Ī╦ŃĘ©ĪŻ[60]ĮY║Ž┴╦╗\╩Įūź╚Ī║═ÅŖųŲķ]║Žūź╚ĪĄ─ā׳cŻ¼╩╣▓╗═¼Ą─ūź╚ĪŲ„─▄ē“┐ņ╦┘ūź╚Ī╬┤ų¬Ą─ŲĮ├µ╬’¾wĪŻį┌[61]ųą╠ß│÷┴╦ę╗ĘN╩▄└K╦„åó░lĄ─╗\╩Įūź╬šĘĮĘ©Ż¼┐╔ęį▒ŻūCŠų▓┐ĘĆČ©ūź╬šĪŻ
4Īó╗∙ė┌Ėąų¬╝s╩°╝»│╔Ą─Ė▀Š½Č╚ÖCŲ„╚╦▓┘┐ž
Å─▓╗═¼Ą─┐šķgīóĖąų¬ą┼Žó║═ŁhŠ│╝s╩°╝»│╔ĄĮę╗éĆĮyę╗Ą─┐“╝▄ųąŻ¼ę²╚ļŁhŠ│╝s╩°ģ^ė“(CRIE)Ė┼─ŅĪŻCRIEėąā╔éĆ╗∙▒Š╣”─▄: ę“×ķŁhŠ│╝s╩°╝Ü╗»▓óĮę╩Š┴╦ę╗ą®ĀŅæBŻ¼╦³┐╔ęįū„×ķļ[║¼é„ĖąŲ„üĒÖz£yŽĄĮyĄ─«öŪ░ĀŅæBŻ╗ė╔ė┌é„Ėąą┼Žó└¹ė├┴╦└ĒŽļł÷Š░║═šµīŹł÷Š░ų«ķgĄ─▓Ņ«ÉŻ¼ę“┤╦╦³┐╔ęįū„×ķę╗éĆÕeš`Öz£yŲ„ĪŻ[62]═©▀^Ęų╬÷╚╦╩ųĄ─ĮŌŲ╩ĮYśŗ╝░Ųõ┐žųŲÖCųŲüĒ╠ĮėæÖCŲ„╚╦╩ųĄ─╚ßĒśąįĪŻ[63]╠ß│÷┴╦ę╗ĘNŠ▀ėąŁhŠ│╝s╩°ģ^ė“Ą─╚ßąįÖCŲ„╚╦ūź╚Ī▓▀┬įŻ¼įō▓▀┬į┐╔ęįĖ∙ō■Į³╦ŲĄ─Įėė|┴”ĘĮŽ“š{š¹ūź╚Īśŗą═ĪŻ
│²┴╦īóé„Ėąą┼Žó┼cŁhŠ│╝s╩°ĮY║Žį┌ę╗éĆ┐šķgų«═ŌŻ¼▀Ć┐╔ęį▓╔╚Īé„Ėąą┼Žóī”ŁhŠ│╝s╩°Ż©╗“ŁhŠ│╝s╩°ī”é„Ėąą┼ŽóŻ®▀MąąčaāöĄ─ĘĮ╩ĮĪŻ[64]╠ß│÷┴╦ę╗ĘNŠC║Žūź╚Īå¢Ņ}Ą─ĮŌøQĘĮ░ĖŻ¼įōĘĮ░Ėį┌ØMūŃ╦∙ėą▒žę¬╝s╩°Śl╝■Ą─ŪķørŽ┬Ż¼┐╔ęį×ķ╠žČ©Ą─╚╬äššęĄĮūź╚ĪĮoČ©ī”Ž¾Ą─ūŅā×╩ųśŗą═ĪŻ[65]蹊┐┴╦ę╗ĘN╚╦╩ų║═╚╦įņ╩ųūź╚Ī║═ų„äėė|├■Ą─Į©─ŻĘĮĘ©ĪŻ[66]蹊┐┴╦╚╦ŅÉ╚ń║╬øQČ©▓┘┐ž╬┤ų¬╬’¾w╦∙ąĶĄ─ūź╚Ī┴”Ż¼Å─Č°īó╚╦ŅÉūź╚Ī╬’¾wĄ─▓▀┬įæ¬ė├ĄĮÖCŲ„╚╦ŽĄĮyųąĪŻ
5ĪóĘ┬╔·Ą─ĘĮĘ©
╚╦╩ųĄ─ņ`╗Ņąį┐╔ęįīŹ¼FĖ▀Š½Č╚Ą─▓┘ū„Ż¼ę“┤╦蹊┐╚╦╩ųĄ─ĮYśŗ║═┐žųŲÖCųŲ┐╔ęįĖ─▀M¼FėąÖCŲ„╚╦ŽĄĮyĄ─įOėŗŻ¼╠ßĖ▀ÖCŲ„╚╦▓┘┐žĄ─╚ßĒśąįĪŻ╬─ųą╠ß│÷┴╦ā╔³cŻ║
Ż©1Ż®ÖCŲ„╚╦─®Č╦ł╠ąąŲ„Ą─±Ņ║Ž╚▀ėÓĮYśŗ:─┐Ū░Ż¼┤¾ČÓöĄÖCŲ„╚╦Ą─╩ų▒█║═╩ųČ╝▓╔ė├┴╦ĮŌ±Ņ┐žųŲŻ¼╚╗Č°Ż¼╩ų▓┐▀\äė╩Ū╚²ŠS┐šķgųąĖ„▀\äė╬╗ų├Ą─»B╝ėŻ¼▀\äėš`▓Ņ╩ŪĖ„ļŖÖCš`▓ŅĄ─»B╝ėĪŻ╚ń╣¹ÖCŲ„╚╦Ą──®Č╦ł╠ąąŲ„─▄ē“ęį▀m«öĄ─ĘĮ╩ĮīŹ¼F±Ņ║Ž║═╚▀ėÓĮYśŗŻ¼ät┐╔ęį╩╣▀\äėĖ³╝ė╚ßĒśĪŻ ę╗ą®čąŠ┐š▀įOėŗ┴╦Š▀ėą╝ĪļņĮYśŗĄ─ą┬ą═ÖCŲ„╚╦╩ųŻ¼┐╔ęįį┌╬┤ų¬ŁhŠ│Ž┬Ė³║├┼c─┐ś╦▀MąąĮ╗╗źĪŻį┌[67]ųą╠ß│÷┴╦ę╗éĆŠ▀ėą╚▀ėÓ╝Īļņ“īäė║═ČÓ▀ģ╝s╩°Ą─ÖCŲ„╚╦▓┘┐žŽĄĮyĮ©─ŻĄ─═©ė├┐“╝▄ĪŻį┌[68]ųąĮķĮB┴╦ę╗ĘNė╔╝Īļņ“īäė╩ųųĖĄ─Ę┬╔·ÖCŲ„╚╦╩ųĪŻį┌[69]ųą╠ß│÷┴╦ę╗ĘN╗∙ė┌╝Īļņ“īäėĄ─ÖCąĄ╩ųā×╗»ĘĮĘ©Ż¼įōĘĮĘ©┐╔ęįā×╗»╝Īļņ“īäėĮYśŗĄ─įOėŗŻ¼ęį½@Ą├ūŅ┤¾Ą─│ą▌d┴”ĪŻ
Ż©2Ż®╚ßąį┐žųŲ▓▀┬į:═©▀^╔Ž╩÷╩ų▒█║═╩ųĄ─±Ņ║Ž╚▀ėÓĮYśŗŻ¼īW┴Ģ═©▀^╚ßąį┐žųŲ▓▀┬įīŹ¼FĖ▀Š½Č╚Ą─▓┘┐žĪŻ╬─ųąėæšō┴╦ā╔ĘNų„ꬥ─┐žųŲ▓▀┬įĪŻ
▓▀┬į1:ŽĄĮyąĶę¬┤¾ų┬┴╦ĮŌ╩ų▒█Īó╩ų═¾║═╩ųĄ─Š½┤_│╠Č╚ĪŻ═©▀^ī”╩ųųĖĄ─▀m«ö┐žųŲŻ¼ī”╩ų▒█║═╩ų═¾Ą─▀\äėš`▓Ņ▀MąąčaāöĪŻ
▓▀┬į2: ╚╦ŅÉīW┴Ģ┐žųŲ╩ųų„ę¬╩Ū╗∙ė┌Įø“×ĪŻ╚ń╣¹±Ņ║Ž╚▀ėÓĮYśŗį┌ÖCąĄ╩ų╔ŽīŹ¼FŻ¼┐╔ęį└¹ė├╔ŅČ╚╔±ĮøŠWĮjŻ¼═©▀^ÅŖ╗»īW┴Ģ║═▐DęŲīW┴ĢüĒīŹ¼F╚ßąį┐žųŲ▓▀┬įĪŻ
6Īó┐éĮY
╬ÕŅÉ▓┘┐žĖ▀Š½Č╚ÖCŲ„╚╦Ą─ĘĮĘ©╝░├┐ĘNĘĮĘ©Ą─╠ž³c╚ńłD6╦∙╩ŠĪŻ─┐Ū░Ż¼ī”Ė▀Š½Č╚ÖCŲ„╚╦┐žųŲĄ─蹊┐╚į╝»ųąį┌╗∙ė┌é„ĖąŲ„ą┼ŽóĄ─ĘĮĘ©╔ŽĪŻ┴”╗“┼żŠžą┼Žóį┌▌^Ą═īė┤╬Ą─┐žųŲĘĮ░ĖīŹ¼FųąŲų°ųžę¬ū„ė├Ż¼╗∙ė┌ęĢėX║═ŠÓļxĄ─ą┼ŽóĘĮĘ©į┌▌^Ė▀īė┤╬Ą─ūRäeĪó£y┴┐║═īW┴Ģųą░lō]┴╦ųžę¬Ą─ū„ė├ĪŻę╗░ŃüĒšfŻ¼▀@ą®ĘĮĘ©Ą─Š½Č╚ų„ę¬╚ĪøQė┌╦∙ė├é„ĖąŲ„Ą─Š½Č╚Ż¼ę“┤╦Ż¼ī”é„ĖąŲ„Ą─Ė─▀Mėą║▄ČÓ蹊┐╣żū„ę¬ū÷ĪŻ

łD6 į┌└¹ė├é„ĖąŲ„║═╝s╩°ĘĮ├µ├┐ĘNĘĮĘ©Ą─╠ž³c
╗∙ė┌╚ßąįÖCśŗĄ─ĘĮĘ©╩ŪĮŌøQÖCŲ„╚╦Ė▀Š½Č╚▌S┐ūčb┼õå¢Ņ}Ą─ĮøĄõĘĮ╩ĮĪŻRCCįOéõ×ķś╦£╩Ą─▌S┐ūčb┼õ╚╬äš╠ß╣®┴╦ę╗ĘNīŹė├Ą─ĮŌøQĘĮ░ĖŻ¼Č°VSA═©▀^į÷ÅŖ“īäėÖCųŲŻ¼×ķīŹ¼F╚ßĒś▀\äė╠ß╣®┴╦┴Ēę╗ĘN┐╔─▄ĘĮ╩ĮĪŻė├╗∙ė┌ŁhŠ│╝s╩°Ą─ĘĮĘ©üĒīŹ¼FĖ▀Š½Č╚ÖCŲ„╚╦Ą─┐žųŲ╩Ūę╗ĘNą┬╦╝┬ĘĪŻ▀@ĘNĘĮĘ©└¹ė├▓┘┐ž▀^│╠ųąĄ─ā╚į┌ą┼ŽóŻ¼▒▄├Ō┴╦Ņ~═Ōą┼ŽóĄ─Ė╔ö_ĪŻĖąų¬╝s╩°╝»│╔ĘĮĘ©║═Ę┬╔·ĘĮĘ©ę▓╠ß╣®┴╦īŹ¼F╚ßĒśņ`Ū╔▓┘┐žŽĄĮyĄ─┐╔─▄ąįŻ¼ĘŪ│ŻŠ▀ėąčąŠ┐ārųĄĪŻ╬┤üĒį┌ęįŽ┬╚²éĆĘĮ├µ╚įėą╔Ņ╚ļ蹊┐Ą─ārųĄŻ¼░³└©Ż║ė├╗∙ė┌īW┴ĢĄ─▓┘┐žĘĮĘ©Ż¼╠ßĖ▀ÖCŲ„╚╦ŽĄĮyĄ─ųŪ─▄Ż╗ė├Ėąų¬╝s╩°╝»│╔ĘĮĘ©Ż¼£p╔┘ÖCŲ„╚╦ŽĄĮyī”Ė▀Š½Č╚é„Ėąą┼ŽóĄ─ę└┘ćŻ╗ė├Ę┬╔·Ą─ĘĮĘ©Ż¼į÷ÅŖÖCŲ„╚╦ŽĄĮyĄ─╚ßĒśąįĪŻ
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |


