
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
1 : ░▓čb6┬Ę LED─ŻĮM
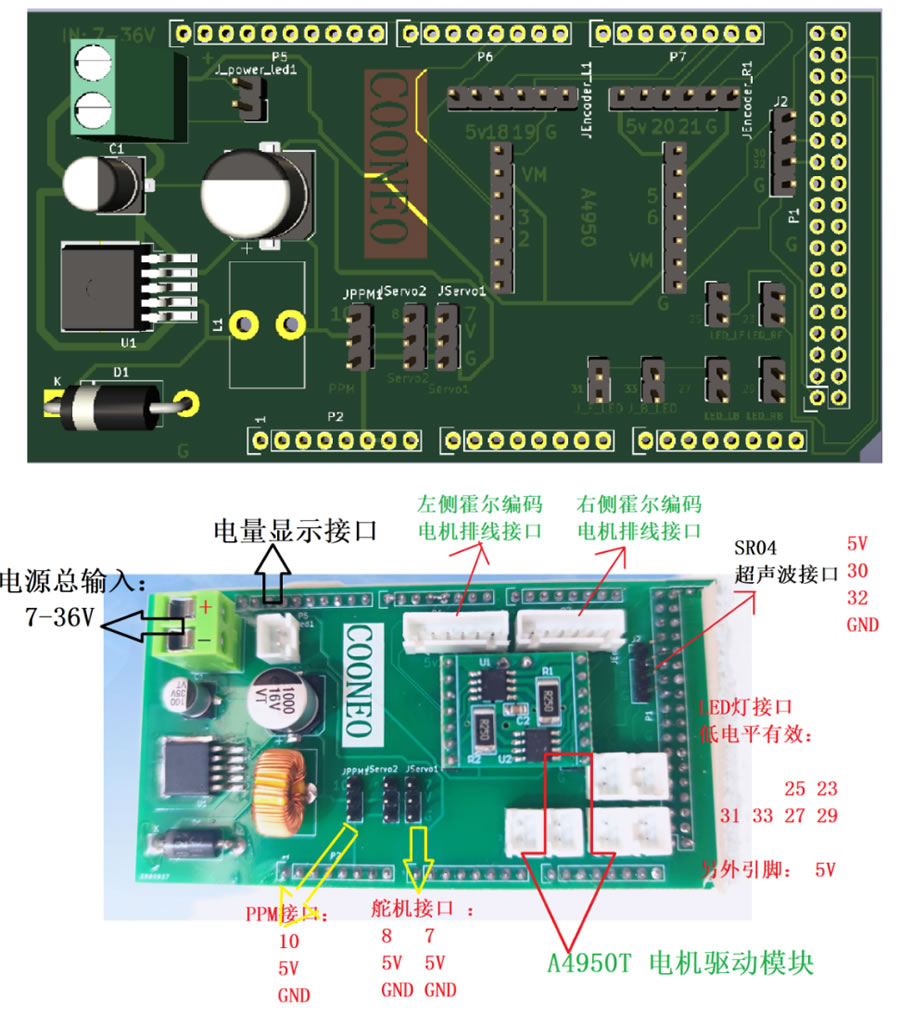
╚ńłD╦∙╩ŠŻ¼öUš╣░ÕėęŽ┬ĮŪ┴¶ėąĄ─6┬Ę░ū╔½LEDĮė┐┌Ż¼Įė┐┌ą═╠¢╩Ū XH2.54 mm Ą─2Pin▓Õū∙Ż¼ų¦│ųČ┼░ŅŠĆŻ¼ę▓ų¦│ųą═╠¢ę╗ų┬Ą─▓ÕŅ^ĪŻ├┐ę╗éĆ▓Õū∙ųąŻ¼ėąę╗éĆę²─_┬ō═©┴╦öUš╣░Õ░Õ▌dĄ─LM2596s-5.0A ąŠŲ¼5VĄ─▌ö│÷Č╦Ż¼┴Ē═Ōę╗éĆę²─_ät┬ō═©Arduinoķ_░l░ÕĄ─öĄūųĮė┐┌Ż¼Ųõę²─_ID╚ń╔ŽłDųą╦∙╩ŠĪŻŻ©25Īó23Īó31......Ż®
2 Ż║LED¤¶Ą─░▓čb╬╗ų├║═║¼┴x
Ą┌ę╗┼┼ū¾£yĄ┌ę╗Ż║▄ćŅ^ėęé╚ LED ¤¶ļŖį┤┐ū╬╗Ż╗
Ą┌ę╗┼┼ū¾é╚Ą┌Č■Ż║▄ć╬▓ėęé╚ LED ¤¶ļŖį┤┐ū╬╗Ż╗
Ą┌Č■┼┼ū¾é╚Ą┌ę╗Ż║▄ćŅ^Ū░┤¾¤¶ LED ¤¶┼┼ļŖį┤┐ū╬╗Ż╗Ż©āH▀m║Ž░ó┐╦┬³Ż®
Ą┌Č■┼┼ū¾é╚Ą┌Č■Ż║▄ć╬╗äx▄椶 LED ¤¶┼┼ļŖį┤┐ū╬╗Ż╗Ż©āH▀m║Ž░ó┐╦┬³Ż®
Ą┌Č■┼┼ū¾é╚Ą┌╚²Ż║▄ćŅ^ū¾é╚ LED ¤¶ļŖį┤┐ū╬╗Ż╗
Ą┌Č■┼┼ū¾é╚Ą┌╦─Ż║▄ć╬╗ū¾é╚ LED ¤¶ļŖį┤┐ū╬╗Ż╗
3 : LED¤¶ķWĀqĘĮ╩ĮĄ─įOėŗ
┤“ķ_ sensors.h ╬─╝■Ż¼į┌│¼┬Ģ▓©│╠ą“Ą─Ž┬ĘĮŻ¼ėąīæĻPė┌LED¤¶ĮMĄ─³c┴┴ĘĮ╩ĮŻ¼ŲõųąūįČ©┴x┴╦ÄūĘNLEDķWĀqĄ─ĘĮ╩ĮŻ¼▓óė├├Č┼eĘĮ╩ĮČ©┴x┴╦╦³éāĄ─├¹ūųŻ¼╚ńŽ┬╦∙╩ŠŻ║

╚╗║¾Ż¼Ųõ╩ŻŽ┬Ą─Š═╩Ū├┐ę╗ĘN├Č┼eŅÉą═Ą─³c¤¶┤·┤aĪŻ
4 Ż║³c¤¶─ŻĮMĄ──Ż╩Į▀xō±Ż¼┤“ķ_ RobotPIDDriver_a4950T_RC.h ╬─╝■Ż¼šęĄĮ loop() ā╚▓┐Ą─╚ńŽ┬▓┐Ęų┤·┤aŻ║
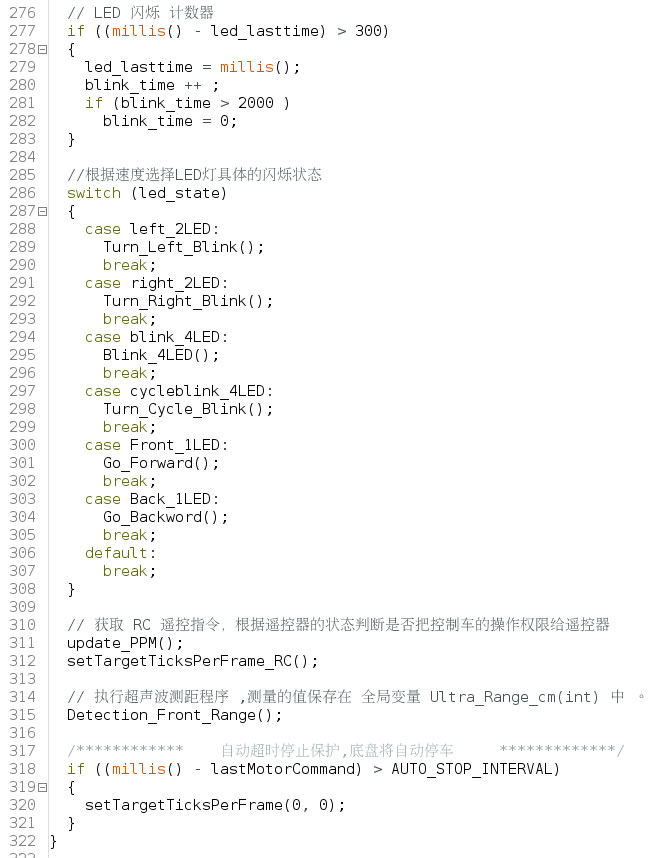
įō▓┐Ęų┤·┤aŻ¼šf├„┴╦LEDķWĀqĀŅæBĄ─ŪąōQĘĮ╩ĮŻ¼ŲõŪąōQĄ─ę└ō■╩Ūę└┐┐ū¾ėę▌åł╠ąąĄ─╦┘Č╚▓ŅüĒøQČ©Ą─ĪŻ╚ńŻ║
Vū¾▌å < Vėę▌å Ż¼╝┤▀M╚ļū¾▐DŽ“¤¶ĀŅæBŻ╗
Vū¾▌å > Vėę▌å Ż¼╝┤▀M╚ļėę▐DŽ“¤¶ĀŅæBŻ╗
Vū¾▌å > 0 Ż¼ Vėę▌å > 0 Ż¼Ū░┤¾¤¶ķ_åóŻ╗Ż©āH▀m║Ž░ó┐╦┬³Ż®
Vū¾▌å <= 0 Ż¼ Vėę▌å <= 0 Ż¼äx▄椶ķ_åóŻ╗Ż©āH▀m║Ž░ó┐╦┬³Ż®
┤·┤aĮžłD╚ńŽ┬Ż║

ĄĮ▀@└’Ż¼─Ńæ¬įōęčĮøš{įć═Ļ«ģROSĄū▒PĄ─ArduinoČ╦
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |



